TOP: Trajectory Optimization via Parallel Optimization towards Constant Time Complexity
Published in IEEE Robotics and Automation Letters, 2025
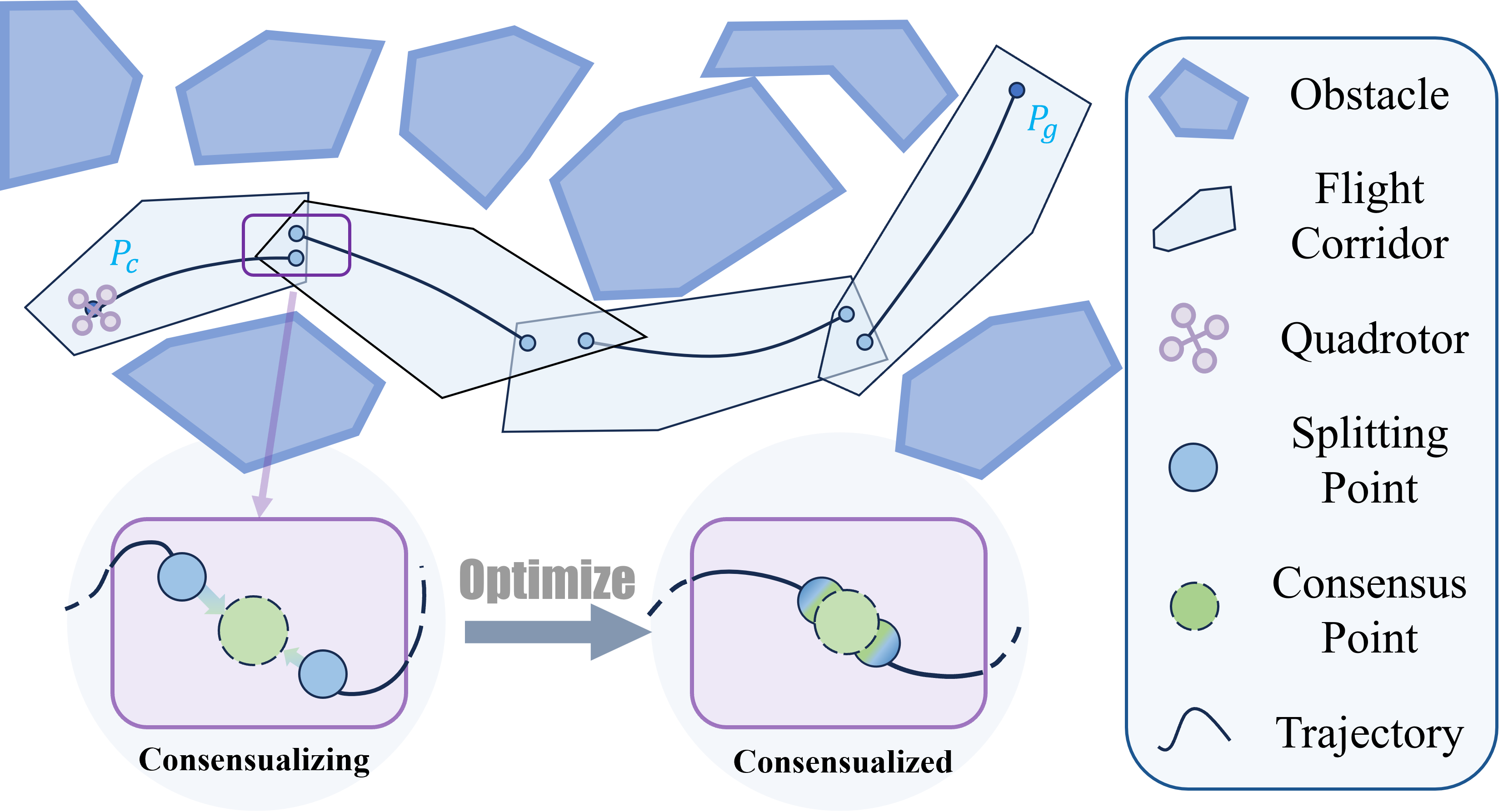
This paper proposes a novel trajectory optimization framework based on the Consensus Alternating Direction Method of Multipliers (CADMM) algorithm, which decomposes the trajectory into multiple segments and solves the subproblems in parallel.
Recommended citation: Yu J, Chen N, Liu G, et al. TOP: Trajectory Optimization via Parallel Optimization towards Constant Time Complexity[J]. arXiv preprint arXiv:2507.10290, 2025.
Download Paper | Watch Video