
Jiajun Yu - 余佳骏
Hi! I am currently pursuing a master’s degree in the FastLab (Fire Group) at the College of Control Science and Engineering, Zhejiang University, under the guidance of Yanjun Cao and Chao Xu. Currently, I’m preparing to apply for PhD research program. If you’re interested in discussing my work or potential collaborations, feel free to email me at jjyu@zju.edu.cn.
Research Interests
My research focuses on parallel trajectory optimization for robotics, which has demonstrated strong performance in large-scale and long-horizon problems. I design GPU-accelerated algorithms that harness modern computing architectures for maximum efficiency. Currently, I am actively exploring the integration of machine learning methods with traditional optimization techniques to further accelerate the trajectory optimization process and uncover new potential from this synergy.
- Motion Planning
- Parallel Trajectory Optimization
- Deep Reinforcement Learning
Publications
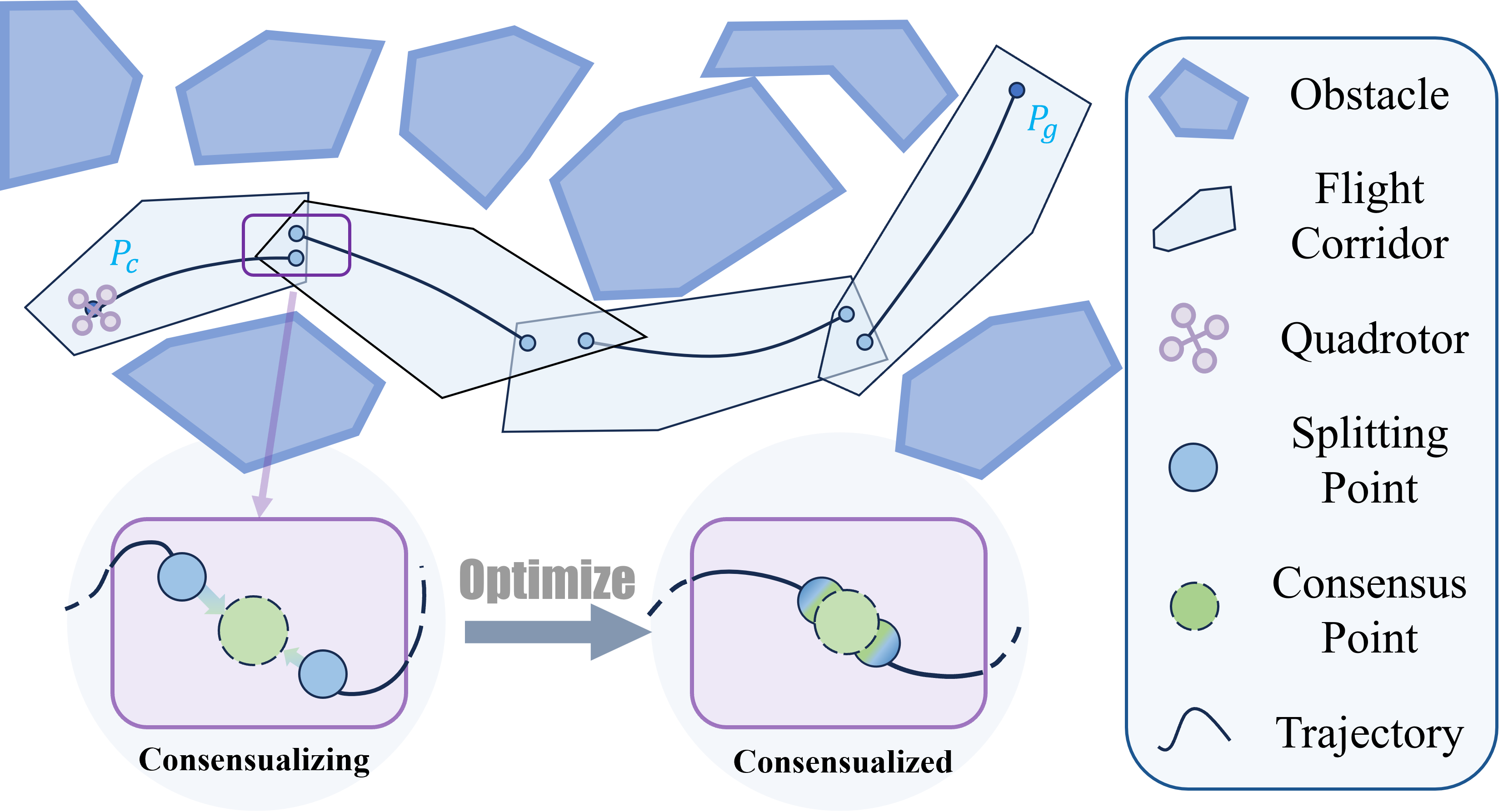
1. TOP: Trajectory Optimization via Parallel Optimization towards Constant Time Complexity
- Authors: Jiajun Yu†, Nanhe Chen†, Guodong Liu, Chao Xu, Fei Gao, and Yanjun Cao
- Venue: IEEE Robotics and Automation Letters, 2025
Links: Paper Video - Status: ✓ Accepted
Projects
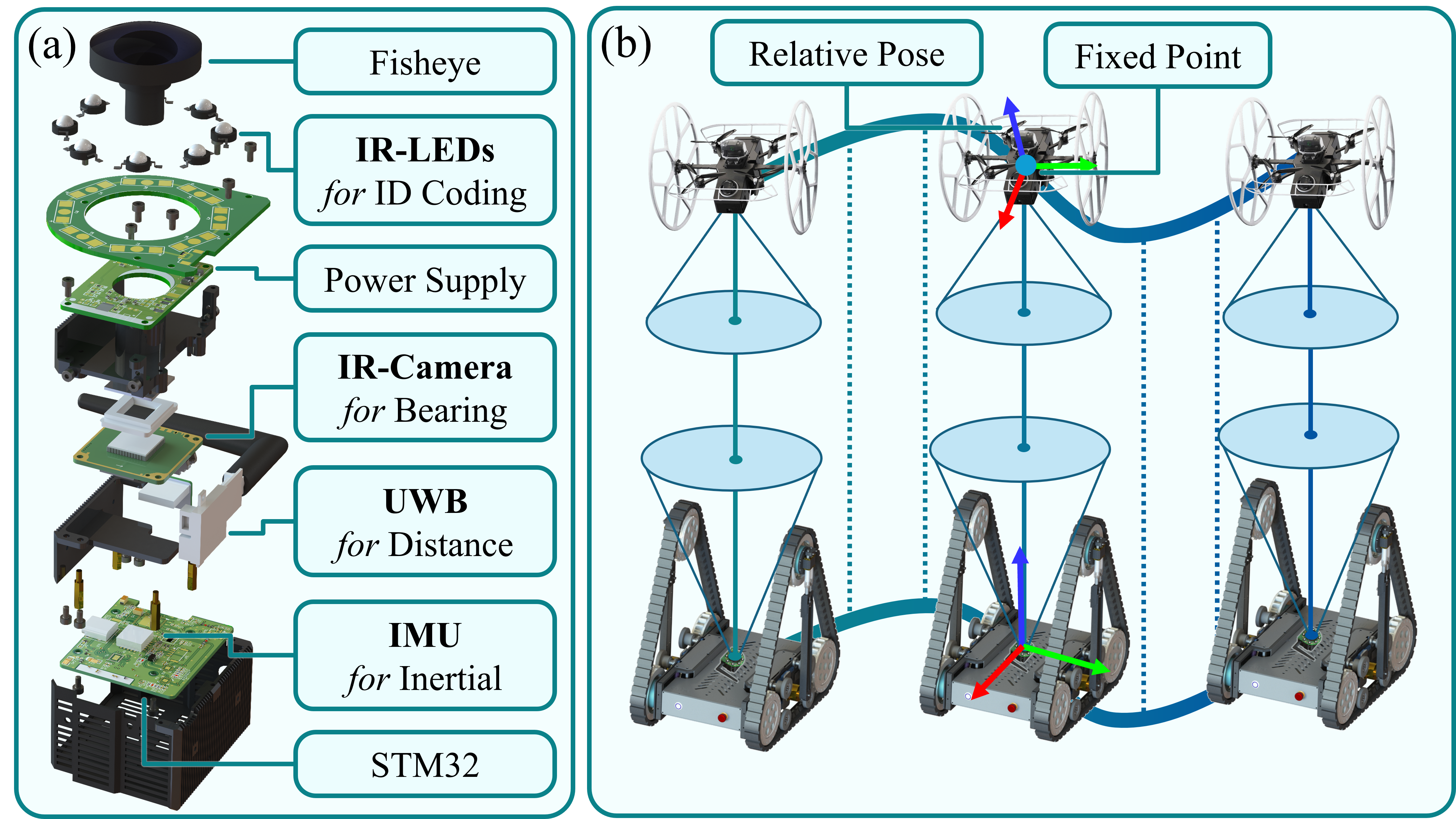
1. Air-Ground Cooperation without Global Information: RoFly and CubeTrack Cooperation with CREPES and CoNi-MPC
- Authors: Jiajun Yu, Jiadong Lu, Li Wang, Mingxuan Zhang, Pengxiang Zhou, Ruitian Pang, Xiangyu Li, Zhehan Li, Chao Xu, and Yanjun Cao
- Venue: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) EXPO, 2025
- Links: Project Page
Ongoing Works
1. Learning Safety-enhanced Navigation with Integrated Model Information
- Authors: Nanhe Chen†, Jiajun Yu†, Mengke Zhang†, Pengxiang Zhou, Chao Xu,Fei Gao, and Yanjun Cao
- Target Venue: IEEE Transactions on Automation Science and Engineering
Links: Paper Video - Status: 📝 To be Submitted
2. Adaptive Trajectory Splitting via a Shared DDPG Agent for Parallel Optimization
- Authors: Jiajun Yu, Guodong Liu, Chao Xu, Fei Gao, and Yanjun Cao
- Target Venue: 2026 IEEE/RSJ International Conference on Intelligent Robots and Systems
Links: Paper Video - Status: 🔧 In Preparation
3. CoNiPA: Cooperative Non-inertial Control Frame with Perception-Aware Mode